Data Sheet 3: Electric Motor Size for Hydraulic Pump Drive
| Figures in the body of this table show the horsepower needed to drive a positive displacement hydraulic pump, and would be valid either for electric motor or engine drive. The table was calculated from the formula: HP = PSI x GPM ÷ (1714 x 0.85). assuming a pump efficiency of 85%, which would be representative of most positive displacement pumps. For pumps with other than 85% efficiency, substitute the actual efficiency, in decimals, in place of 0.85 in the formula.For values of PSI and GPM not shown, calculations can be made with the above formula, or values can be interpolated from the table. |
| GPM | 500 PSI | 750 PSI | 1000 PSI | 1250 PSI | 1500 PSI | 1750 PSI | 2000 PSI | 2500 PSI | 3000 PSI | 3500 PSI | 4000 PSI | 5000 PSI | 6000 PSI |
| 3 | 1.03 | 1.54 | 2.06 | 2.57 | 3.09 | 3.60 | 4.12 | 5.15 | 6.18 | 7.21 | 8.24 | 10.3 | 12.4 |
| 5 | 1.72 | 2.57 | 3.43 | 4.29 | 5.15 | 6.00 | 6.86 | 8.58 | 10.3 | 12.0 | 13.7 | 17.2 | 20.6 |
| 7.5 | 2.57 | 3.86 | 5.15 | 6.43 | 7.72 | 9.01 | 10.3 | 12.9 | 15.4 | 18.0 | 20.6 | 25.7 | 30.9 |
| 10 | 3.43 | 5.15 | 6.86 | 8.58 | 10.3 | 12.0 | 13.7 | 17.2 | 20.6 | 24.0 | 27.5 | 34.3 | 41.2 |
| 12.5 | 4.29 | 6.43 | 8.58 | 10.7 | 12.9 | 15.0 | 17.2 | 21.4 | 25.7 | 30.0 | 34.3 | 42.9 | 51.5 |
| 15 | 5.15 | 7.72 | 10.7 | 12.9 | 15.4 | 18.0 | 20.6 | 25.7 | 30.9 | 36.0 | 41.2 | 51.5 | 61.8 |
| 17.5 | 6.01 | 9.01 | 12.0 | 15.0 | 18.0 | 21.0 | 24.0 | 30.0 | 36.0 | 42.0 | 48.0 | 60.1 | 72.1 |
| 20 | 6.86 | 10.3 | 13.7 | 17.2 | 20.6 | 24.0 | 27.5 | 34.3 | 41.2 | 48.0 | 54.9 | 68.6 | 82.4 |
| 22.5 | 7.72 | 11.6 | 15.4 | 19.3 | 23.2 | 27.0 | 30.9 | 38.6 | 46.3 | 54.1 | 61.8 | 77.2 | 92.7 |
| 25 | 8.58 | 12.9 | 17.2 | 21.4 | 25.7 | 30.0 | 34.3 | 42.9 | 51.5 | 60.1 | 68.6 | 85.8 | 103 |
| 30 | 10.3 | 15.4 | 20.6 | 25.7 | 30.9 | 36.0 | 41.2 | 51.5 | 61.8 | 72.1 | 82.4 | 103 | 124 |
| 35 | 12.0 | 18.0 | 24.0 | 30.0 | 36.0 | 42.0 | 48.0 | 60.1 | 72.1 | 84.1 | 96.1 | 120 | 144 |
| 40 | 13.7 | 20.6 | 27.5 | 34.3 | 41.2 | 48.0 | 54.9 | 68.6 | 82.4 | 96.1 | 110 | 137 | 165 |
| 45 | 15.4 | 23..2 | 30.9 | 38.6 | 46.3 | 54.1 | 61.8 | 77.2 | 92.7 | 108 | 124 | 154 | 185 |
| 50 | 17.2 | 25.7 | 34.3 | 42.9 | 51.5 | 60.1 | 68.6 | 85.8 | 103 | 120 | 137 | 172 | 206 |
| 55 | 18.9 | 28.3 | 37.8 | 47.2 | 56.6 | 66.1 | 75.5 | 94.4 | 113 | 132 | 151 | 189 | 227 |
| 60 | 20.6 | 30.9 | 41.2 | 51.5 | 61.8 | 72.1 | 82.4 | 103 | 124 | 144 | 165 | 206 | 247 |
| 65 | 22.3 | 33.5 | 44.6 | 55.8 | 66.9 | 78.1 | 89.2 | 112 | 134 | 156 | 178 | 223 | 268 |
| 70 | 24.0 | 36.0 | 48.0 | 60.1 | 72.1 | 84.1 | 96.1 | 120 | 144 | 168 | 192 | 240 | 288 |
| 75 | 25.7 | 38.6 | 51.5 | 64.3 | 77.2 | 90.1 | 103 | 129 | 154 | 180 | 206 | 257 | 309 |
| 80 | 27.5 | 41.2 | 54.9 | 68.7 | 82.4 | 96.1 | 110 | 137 | 165 | 192 | 220 | 275 | 329 |
| 85 | 29.2 | 43.8 | 58.3 | 72.9 | 87.5 | 102 | 117 | 146 | 175 | 204 | 233 | 292 | 350 |
| 90 | 30.9 | 46.3 | 61.8 | 77.2 | 92.7 | 108 | 124 | 154 | 185 | 216 | 247 | 309 | 371 |
| 100 | 34.3 | 51.5 | 68.6 | 85.8 | 103 | 120 | 137 | 172 | 206 | 240 | 275 | 343 | 412 |
Using the Table
Pressure and flow ranges in the table will cover most applications, but intermediate values can be estimated by combining values in the table. Example: HP required at 4500 PSI is the sum of values shown in the 2000 and 2500 PSI columns. At 73 GPM, for example, HP will be the sum of values in the 3 and 70 GPM lines. At 10,000 PSI, power is twice the value at 5000 PSI at the same GPM.
For pressures less than 500 PSI, HP calculations tend to become inaccurate because mechanical friction and fluid flow losses are a greater percentage of applied pressure.
Approximate power requirements can be estimated with the “Rule of 1500” which states:
1 HP is required for each 1 GPM at 1500 PSI or any multiple of 1500 such as 3 GPM at 500 PSI, 2 GPM at 750 PSI, 1/2 GPM at 3000 PSI, etc.
Another handy rule-of-thumb is that it takes about 5% of the pump maximum rated HP to drive the pump when unloaded and pressure is very low. This power is consumed in bearing losses and fluid flow losses.
Permissible Overloading of a Motor
The motor most often used to drive a hydraulic pump is a 3-phase, induction-type, Design B motor. The service factors on most open frame sizes is 0.15 which means that the motor can be overloaded about 15% above current shown on its nameplate, assuming it is being operated in a normal temperature environment. TEFC and explosion proof motors have a service factor of 1.0.
An electric motor can be overloaded for short periods during the cycle provided the average horsepower is no greater than its nameplate rating plus service factor where this applies.
The amount of intermittent overloading is up to the user, but we suggest the overload be no more than 25% above its nameplate current rating sustained no longer than about 10% of the time required for a complete cycle.
Operation on Incorrect Frequency (Hz)
Most A-C 60 Hz motors can be operated on a 50 Hz line and vice versa, but adjustments will have to be made in the current, HP, and speed ratings. The important thing to remember is that it is the current which causes heating. The HP which can be produced will be related to its current draw, and may be more or less than its nameplate rating.
| Characteristic | 60 Hz Motor on 50 Hz Line | 50 Hz Motor on 60 Hz Line |
| HP will be: | 16-2/3 less | 20% more |
| Adjust voltage to:* | 16-2/3 less | 20% more |
| Full load torque: | Same | Same |
| Breakdown torque: | Same | Same |
| Locked rotor torque: | Same | Same |
| Locked rotor current: | 5% less | 6% more |
| Speed, RPM: | 16-2/3 less | 20% more |
| Max. service factor: | 1.00 | 1.00 |
| Noise level: | Less | More |
*Voltage adjustment is to maintain current at rated value, to produce rated shaft torque. Current is always a limiting factor on a variation in rated Hz (frequency) or voltage.
Effects of Low Voltage
Nameplate HP is based on full voltage being available. HP output is a combination of voltage times current. If voltage is too low, then to produce rated HP the current must be too high, and this overheats the motor. Motors can usually accommodate as low as 90% of rated voltage and still produce nameplate HP although temperature rise in the windings will be greater than rated rise. For permanent operation on a voltage source known to be low, the HP load should be limited, and reduced by the same percentage that the voltage is low.
Effects of High Voltage
If motor load does not exceed nameplate HP rating, full load current will be lower than nameplate rating and the motor will run cooler than rating. However, its starting and breakdown current (at stall) will be higher than normal. The wiring, fusing, and thermal overload protection will have to be sized accordingly. Motor noise will increase.
Using an Oversize Motor
Using a 20 HP motor on a system which requires only 10 HP, for example, will give good results for running the pump but will consume more electricity than a 10 HP motor and will cause the power factor of the plant electric system to be poorer, especially during periods the motor is idling. Idling current of a 20 HP motor is about half the full load current of a 10 HP motor. This is an extra power waste during periods in the cycle when the pump is idling.
Using an Undersize Motor
Using a 20 HP motor on a system which requires 25 HP for brief periods is quite possible, but during overload periods the current of such a motor maybe-about twice the current of a 25 HP motor. There will be an extra waste of power during peak periods in the cycle. But the smaller motor could more than make this up during periods in the cycle when less than 20 HP is required.
Some power companies charge for power by the number of kilowatt-hours used. But they may base their rate on the maximum current flow at any moment during the metering period. A poorer power factor in the plant increases current flow without increasing HP delivered. Therefore, either oversizing or undersizing a pump-drive electric motor will increase the cost of running the system.
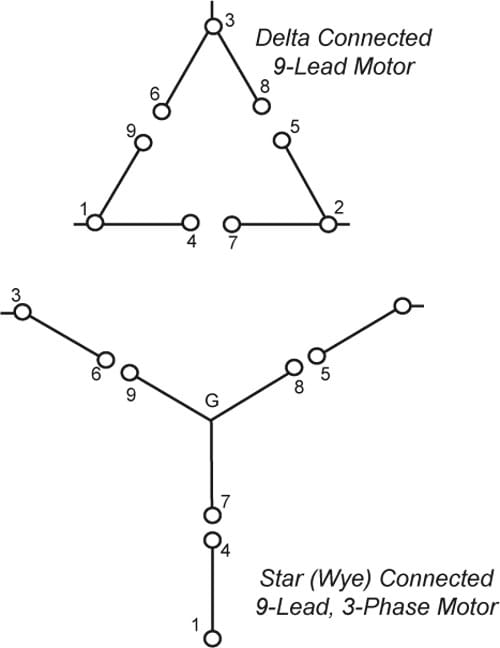
NEMA Standard Terminal Markings and Connections for 9-Lead, 3-Phase Motors
These diagrams show which motor leads must be wired together inside the motor junction box for operation of the motor on its highest or lowest voltage as stated on its nameplate. Normally, on a star connected motor the center point of the windings is brought out for connection to ground.
DELTA CONNECTION
| Voltage | Line 1 | Line 2 | Line 3 | Together |
| Low | 1 & 6 & 7 | 2 & 4 & 8 | 3 & 5 & 9 | None |
| High | 1 | 2 | 3 | 4 & 7, 5 & 8, 6 & 9 |
STAR (WYE) CONNECTION
| Voltage | Line 1 | Line 2 | Line 3 | Together |
| Low | 1 & 7 | 2 & 8 | 3 & 9 | 4 & 5 & 6 |
| High | 1 | 2 | 3 | 4 & 7, 5 & 8, 6 & 9 |
 |
© 1988 by Womack Machine Supply Co. This company assumes no liability for errors in data nor in safe and/or satisfactory operation of equipment designed from this information.