Data Sheet 65: Circuit Design with Vane-Type Rotary Actuators
A rotary actuator is an output device for a fluid power system which delivers an oscillating motion (back and forth) over a limited arc. True vane-type actuators are limited to less than l full turn. Other types using gears or rack and pinion may give up to several turns. In this issue, only the true vane-type actuator will be considered, although calculations for torque and speed may apply to all types.
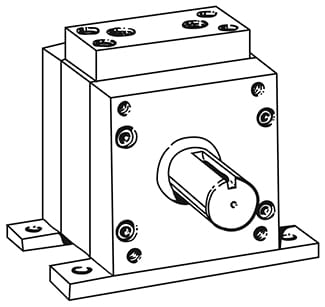
Figure 1. Vane-type actuator.
Rotary actuators are useful where a rotary output of high torque at low speed is suitable for the application. Torque is produced by exposure of fluid pressure against vane surfaces. Because of their very nature of limited rotation they must be controlled with a 4-way directional valve.
Actuators are built for both air and hydraulic operation, and in size from miniature models which can be held in the palm of the hand to very powerful models delivering over a million foot-lbs. of torque. Because of heavy internal and/or external side loads on their bearings and the difficulty of internally sealing square corners, they are designed to operate at lower pressures than are hydraulic cylinders.
Vane-type actuators are available either in single-vane construction with a maximum angular rotation of 280°, or double-vane construction with a maximum of about 100°. Double-vane models give twice the torque in the same frame but are limited to less than half the angular movement. Where greater than 360° rotation is required, the angular movement must be multiplied through gearing or levers, or a type other than vane must be used.
Actuators accelerate to full speed almost instantly, move at a controlled uniform speed, and produce equal torque in both directions, constant throughout their arc of travel. Their efficiency is comparable to that of hydraulic motors, and less than that of hydraulic cylinders.
Typical Applications
Many applications do not lend themselves well for the straight-line motion of cylinders, and can be performed more efficiently by rotary actuators. Motions such as mixing, transferring of parts, indexing, valve turning, holding tension, turnover or dumping, twisting, oscillating, etc. Actuators can produce a constant torque over an arc, which is not possible with cylinders working a lever.
Fluid Circuit
Figure 2. The fluid circuit to control a hydraulic rotary actuator is similar to a cylinder circuit with a few variations.
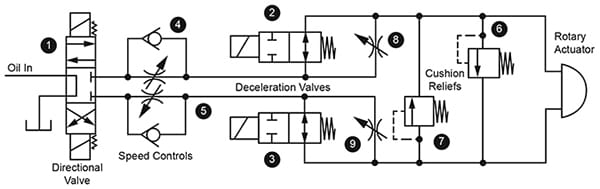
Figure 2. Fluid circuit for controlling a rotary actuator.
Directional control Valve 1 may be any of the spool types used to control cylinders. It must have a center neutral position; 2-position valves are not recommended.
Speed should be reduced near the end of the arc to prevent damaging impact to the vanes in the actuator. Deceleration can be with 2-way, N.O. solenoid valves. Limit switches placed near the ends of the stroke can actuate the valves, 2 and 3, causing the main flow to be diverted through pre-set needle valves, 8 and 9, to reduce speed. Sometimes the easiest and cheapest means of deceleration is by cylinder-type dashpots at each end of the arc.
Speed control Valves 4 and 5 may be used, if necessary to limit speed in either direction, but the circuit should be designed, if possible, to eliminate speed controls because of the power waste and oil heating effects in the system.
We recommend cushion relief valves for most actuator applications where the actuator may be stopped in mid stroke by centering the 4-way valve. These can be individual standard relief valves, or a cushion valve. Relief valve setting should be 500 PSI higher than the relief valve setting on the pump. The valves should be a non-adjustable type, or the adjustment should be locked or sealed to prevent tampering and to prevent them being set to too high a pressure.
On applications where the static load would cause downward drift after the 4-way valve was centered, lock valves or counterbalance valves may be installed at Points “x”.
Torque Calculation from Actuator Displacement
The torque produced by any rotary device whether actuator or hydraulic motor is related only to its cubic inch displacement and the operating pressure, and can be calculated with these formula:
T = PSI × D ÷ 2π or, D = T × 2π ÷ PSI
where D = cubic inch displacement if the actuator
could make one full revolution.
T = torque in inch-lbs.
π = 3.14.
Actuator Torque by Rule-of-Thumb
For every 1 C.I.R. displacement, a torque of 16 inch-lbs. will be produced for every 100 PSI of applied pressure.
Example: An actuator with 60 C.I.R. displacement will produce 60 × 16 = 960 inch-lbs. at 100 PSI, 1,920 inch-lbs. at 200 PSI, 9,600 inch-lbs. at 1,000 PSI, etc.
Note: Be sure to use displacement for a full 360° arc. If actuator displacement is given for a smaller arc, 100° for example, it must be extrapolated to 360° by proportion.
Calculating Rotational Speed
Rotary actuators are rated to displace (so many) cubic inches of physical volume for (so many) degrees of rotation.
For hydraulic operation the time necessary for the actuator to make its travel arc can be calculated with reasonable accuracy with this formula:
T = [D × 60] ÷ [GPM × 231]
where D = cubic inch displacement over its measured arc
(not its cubic inches for a full revolution);
T = time, in seconds, for the actuator to make the arc;
GPM is the oil supply in gallons per minute.
Efficiency
The formula and chart above show theoretical values of torque at 100% efficiency. In practice, a vane-type actuator should operate at about 85% efficiency at the high end of its pressure range and possibly as low as 55% at very low operating pressures.
Selection of a Rotary Actuator
The torque and speed requirements of the load must be determined before any selection can be made. For more information on actuator, design and selection the reader is referred to the Womack book “Industrial Fluid Power – Volume 3”.
Toggle Motion from a Rotary Actuator
Figure 3. A rotary actuator can give a straight-line reciprocating movement which is not possible with a cylinder and hard to duplicate with any other type of actuator. It is excellent for controlling massive loads where a large amount of energy is involved in starting and stopping the load. In this figure the load moves horizontally and is coupled to a rotary actuator which makes a 180° oscillating movement.
On starting, the actuator characteristic is almost infinite force against the load. It can start the load gently into motion, can accelerate it to a maximum speed at mid stroke, then decelerate it gently to zero at the end of the stroke. Just before the end of the stroke, the actuator can exert almost infinite force due to toggling action.
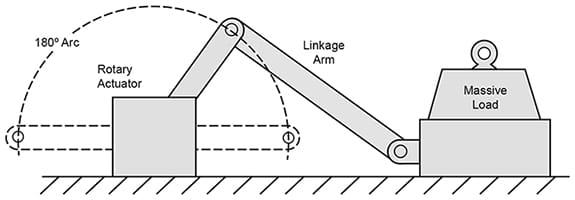
Figure 3. Unique toggle action provided by a rotary actuator.
Application Notes
Shaft End Loading. Do not subject the actuator to any end loading of its shaft. A sliding spline coupling between actuator shaft and the load is a good way to prevent load thrust from being transmitted to the actuator.
Shaft Side Loading. Do not subject the actuator to heavy side loads. Loads which would side load the shaft should be supported on a jackshaft and coupled with a solid spline coupling.
Two Actuators in Parallel. A jackshaft provides a convenient method of coupling two actuators to a common load. When the jackshaft is extended beyond its support bearings, it provides a convenient place to mount special cams to control deceleration.
© 1990 by Womack Machine Supply Co. This company assumes no liability for errors in data nor in safe and/or satisfactory operation of equipment designed from this information.