Data Sheet 36: Bootstrapping to Save Power – Part 1, Tension Stressing
What is “Bootstrapping”?
“Bootstrapping” is a technique which can be applied on certain kinds of applications to save a large amount of input power and to substantially reduce heat accumulation caused by power waste when using more conventional techniques.
Bootstrapping methods can be used for holding a constant stress (tension, torsion, or compression) on material which is traveling in a continuous and uninterrupted movement through a process or operation. By conventional techniques, a large amount of power is wasted by the method used to create the stress in the material a mechanical brake, hydraulic relief valve, etc. Bootstrapping by the fluid power method described here can save up to 85% or more of the stressing power that normally would be lost.
Bootstrapping can also be done with DC electric motor/ generators; but fluid power methods are usually less expensive, use standard catalog components, and are more controllable. Components are available for producing very high stress levels over a wide range.
A bootstrapping system bears some similarity to a regenerative system in which part of the power is re-circulated to another part of the system without being dumped. Actually, the only input power needed for a bootstrap system is enough to keep the material moving at the desired speed, plus a small amount to make up for circulation losses in the tensioning part of the circuit where power is being re-circulated from one hydraulic motor to another.
Two conventional methods of holding tension on a moving cable are shown in Figures 1 and 2. An improved method of doing the same job, using the fluid power bootstrap principle is shown in Figure 3 on the opposite side of this sheet.
Tension stressing is featured in this issue. Future issues will feature torque and compression stressing.
Figure 1. Tensioning With a Brake. This is a simple system often used on low power applications. Most of the input power is eventually “burned up” in the brake.
A fixed displacement pump drives a hydraulic motor. A speed control valve is sometimes added. The hydraulic motor shaft is coupled to the cable spooling drum, either directly or through reduction gearing. The cable is looped around an unspooling drum to which is added a mechanical brake to maintain cable tension. The brake tension is additive to the tension already existing in the cable.
Obviously, this is a very inefficient system, and when used on high power applications the brake must be air or water cooled to dissipate the large amount of wasted power.
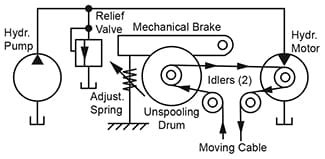
Figure 1. A mechanical brake is used to hold
tension on a cable as it is unspooled. Tension
is regulated with an adjustable brake spring.
Figure 2. Hydraulic Tensioning. A fixed displacement pump supplies fluid power to a fixed displacement hydraulic motor which spools the cable. To provide tension, the cable is looped around a drum coupled to the shaft of a hydraulic pump. Flow produced by pump rotation discharges across an adjustable relief valve, and the tension can be regulated by adjusting the relief valve.
Like Figure 1, the tensioning is additive to the normal tension in the cable before it reaches the unspooling drum.
This system is also highly inefficient but does have one advantage over brake tensioning: the generated heat is carried by the oil back to the reservoir, and is more easily disposed of by using a heat exchanger.
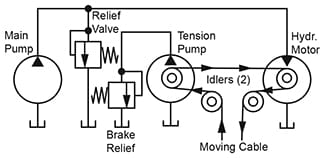
Figure 2. A hydraulic pump and adjustable relief valve
tensioning system is a little more versatile, but does
not solve the problem of high energy waste.
Simple Bootstrap System
Most of the power which is wasted in the systems of Figures 1 and 2 is a result of holding tension on the cable while it is moving. By using fluid power for at least this part of the system, most of this power waste (and oil heating) can be eliminated.
Since bootstrapping applies only to systems where material is moving in a continuous and uninterrupted flow, in one direction, hydraulic motors are used instead of cylinders.
The simplest, most economical, and most straightforward way of designing the system is to separate it into two independent and unrelated drive systems as follows:
1. Tensioning. As shown in Figure 3, the tensioning part of the design consists of a variable displacement pump, with pressure compensator, supplying pressure to a pair of identical hydraulic motors. Motor A should be plumbed so it will normally run in a CW rotation, and Motor B should be plumbed to run normally in a CCW rotation. The cable is strung between these motors on drums of equal diameter. Cable tension is a result of these two motors pulling in opposite directions. But since the motors have identical displacement, and are operating at identical PSI pressure, the system will not move in either direction.
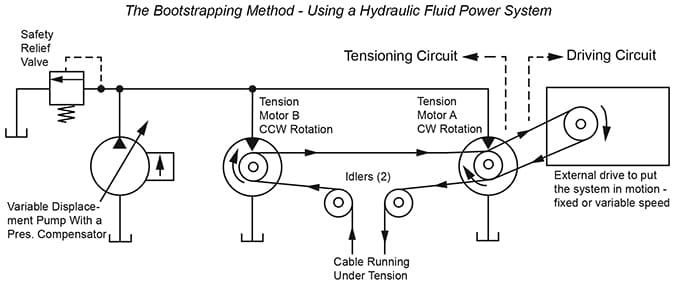
Figure 3. Two hydraulic motors, of equal displacement, pull in opposite directions to keep tension
on the cable. A separate drive source, on the right, supplies power to overcome the running friction.
2. Motion. Cable movement is provided by a separate drive coupled to one of the drums. This can be a completely separate fluid power drive or on some applications could be an electrical or mechanical drive. It can be a fixed speed drive, but usually a variable speed is preferred.
As the cable moves through the system, Motor B is driven like a pump. The oil flow which it produces fills an equal void in Motor A. Thus, no flow is required from the pump, except a relatively small amount to make up for slippage the two motors.
Selection of Components
Pump. This should be a variable displacement type with adjustable pressure compensator. It must be capable of operating at a PSI pressure sufficient to give the hydraulic motors the torque they need for the required cable tension. Theoretically, no flow is required from the pump, but in practice it must supply sufficient flow for the maximum slippages in itself and the two motors. Slippage will increase as the units become worn, so an allowance for increased slippage due to wear should be made.
A piston pump is preferred because it operates with less slippage and its compensator will adjust over a wider range than most other types of pumps.
Hydraulic Motors. Two identical fixed displacement motors should be used. Piston motors give less torque ripple at low speed than most other types. These motors must be capable of being over-driven in the reverse direction. Those motors with built-in speed reduction may not work well.
Note: Each motor, by itself, must produce the full tensioning torque. Two motors pulling on opposite ends of a cable produce only the tension of a single motor pulling against a cable anchored at the opposite end. Both cable drums must be the same diameter. Calculate motor torque:
Torque (ft-lbs) = Tension (lbs) × Drum Radius (ft)
RPM required on a cable drum for a desired linear speed on the cable is calculated with this formula:
RPM = Linear Speed (ft/min) + [2π × Drum Radius (ft)]
Relief Valve. As a safety precaution, a relief valve should be used even with pressure compensated pumps. The compensator may not give sufficient protection against pressure spikes on “tight” circuits. (Short connecting lines).
Operation of the System
Cable tension is adjusted with the pressure compensator on the pump, and will not affect cable speed. Speed may be adjusted with the external drive and will not affect tension.
Any change in pre-tension, before the cable enters the drum on Motor B, will affect cable tension. If this is a critical factor, a mechanism can be added either to read out the actual tension so it can be re-adjusted by an operator, or to be linked to the compensator for automatically re-adjusting the system PSI pressure to keep cable tension constant.
© 1990 by Womack Machine Supply Co. This company assumes no liability for errors in data nor in safe and/or satisfactory operation of equipment designed from this information.